Current Space Debris Remediation and On-Orbit Servicing Initiatives

(1)
Executive Board, International Association for the Advancement of Space Safety (IAASS), Arlington, VA, USA
Introduction
There are now quite a number of active programs around the world that are seeking to address the orbital space debris problem through remediation practices. In a few cases there are on-orbit servicing (also known as in-orbit servicing) programs that could also be utilized to assist with orbital debris remediation programs. The diversity of approach in terms of different technologies, governmentally-backed versus commercial approach, as well as differing economic models and maturity of program development is clearly quite large. Because of these quite divergent approaches, it is difficult to provide a comparative analysis of these various efforts that is systematic and consistent. The best approach thus seems is to present the various governmentally backed programs that are currently underway or planned and then to follow this with a presentation of those programs that are proceeding as private initiatives on a commercial or quasi-commercial or private institutional basis.
After these presentations are complete a summary chart will summarize these various initiatives so as to depict their source of financing, technological approach and general timetable of implementation. In Chap. 5, we well turn back to the examination of a wide range of possible new technological approaches that might be used to address orbital debris remediation that are currently at various stages of research and development. These will begin noting that there are also ground-based attempts to track and alter orbits to avert collisions and then to work up through alternative technological approaches that are more complex, or at least conceptually different than more traditional or conventional approaches.
Governmental Backed Orbital Remediation Programs and Initiatives
The following four projects sponsored by the U.S. Government and by the German Space Agency (DLR) all feature sophisticated robotic spacecraft systems. In each case these spacecraft are designed to maneuver with high accuracy into close proximity of other spacecraft and to attach themselves to other spacecraft for repairs, augmentation, or if desired and needed, to bring about de-orbit or reposition to another orbit or to put into a parking orbit.
Orbital Express Space Operations Mission
This was a joint program of the U.S. Defense Advanced Research Projects Agency and the NASA Marshall Spaceflight Center. The Orbital Express program experiment was launched on March 8, 2007 on an Atlas V launcher. This project involved two spacecraft. The larger spacecraft was the ASTRO “servicing spacecraft” and the other was the smaller NEXTSat that served as the “client” space. This NEXTSat spacecraft was envisioned as a prototype design for future spacecraft that could be designed for in-orbit servicing. This project is relevant to active debris removal in at least two ways. One way is that proximity maneuvering in space and capture of a debris element is a critical technical aspect of active debris removal as will be discussed in Chap. 5. Secondly if it is possible to service in-orbit satellites to resupply them with fuel, batteries, and new electronics and antenna systems then the population of satellites launched into orbit can be reduced. This means less satellites and upper stage rockets that would need to be disposed of and thus would lead to the creation of less space debris.
ASTRO is an acronym for Autonomous Space Transport Robotic Operations. This ASTRO servicing satellite was almost 1,000 kg in total mass and was fueled with nearly 140 kg of hydrazine propellant. Its height and diameter were nearly 2 m. Its robotic arm allowed for capture and manual docking. During docking it was possible to transfer fuel or retrofit or augment elements of the NEXTSat target vehicle.
The NextSat target spacecraft had a mass of only 225 kg and was only about 1 m in diameter. Both of these spacecraft are depicted as flying in orbit in the figure below. [Orbital Express] (Fig. 2.1).
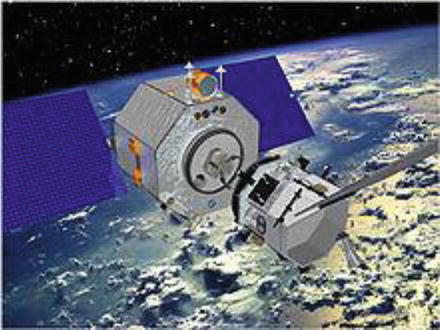
Fig. 2.1
The Astro “Servicing” spacecraft and smaller NEXTSat pictured in orbit (Graphic Courtesy of NASA)
This joint program cost about $300 million for the design and fabrication of the two spacecraft and the Atlas V launch. This was the first such space experimental program for on-orbit servicing, although Japan in the 1990s (i.e. then NASDA and now JAXA) was able to carry out the first robotic rendezvous between two spacecraft in orbit under its experimental test satellite (ETS) program.
Deutsche Orbitale Servicing (DEOS) Mission
This project of the German Space Agency (DLR), which in many ways emulates the U.S. Orbital Express program, is currently well underway. Contracts for all aspects of the mission have been awarded to Spacetech, which is the prime contractor. This development program will provide for on-orbit servicing as carried out by the so-called “Servicer” spacecraft. The specific objective of the DEOS program is to demonstrate how a defective spacecraft that is tumbling in an uncontrolled manner could be captured and suitably retrofitted so that it could resume operations rather than becoming a defunct spacecraft and thus worthless space debris. Further this mission is designed so that if the on-orbit servicing program to restore operational capability to the “Client” satellite (i.e. the name for target uncontrolled spacecraft) is not successful, then the “Servicer” (or capturing spacecraft) can link together with the “Client” and successful deorbit both spacecraft in tandem. [Deos: A Robot]
The DEOS “Servicer” spacecraft, known as the Phase A program, and the “Client” spacecraft, known as Phase B program, are both under contract to Spacetech Gmbh Immenstaad of Germany and will soon be ready for launch. Necessary ground control systems for the intended space experiments are also currently being readied for use. The Fig. 2.2 shows the robotic “Servicer” (Phase A) spacecraft, the “Client” (Phase B) spacecraft. Figure 2.3 provides an illustration of the command and control operations from the ground and the GEO relay satellite that can also be used to provide in-orbit commands. In addition to the experiments related to capturing and to coping with an uncontrolled and tumbling spacecraft the “Servicer” will also carry out refueling of the “Client” spacecraft. It will also test the ability of the Servicer to install new mechanical and electrical equipment on the Client spacecraft. A complete listing of the seven planned experiments is available on the DEOS website. [Deos Phase A]

Fig. 2.2
The DEOS experiment
Fig. 2.3
DEOS servicer, client and ground control system (Both graphics courtesy of DLR, the Germany Space Agency)
The DEOS project is designed so that both spacecraft will be directly in communications with the ground at all times. During the special Low Earth Orbit Proximity (LEOP) experiments it is intended that there will be back up “supplementary ground station network” capabilities to provide for redundancy. The precise launch date for the DEOS Phase A and B spacecraft has not yet been set. [DEOS Phase A]
NASA Robotic Refueling Mission (RRM)
The NASA Robotic Refueling Module (RRM), on which development began in 2009, was brought to the International Space Station by the Atlantis Space Shuttle in 2011 as the last mission for the shuttle launch system. This specially designed module is about the size of a washing machine and its mass is approximately 250 kg and is shaped more or less as a 1 m cube—or about the size of a dishwasher. The RRM includes 1.7 L of ethanol that was used to demonstrate fluid transfer in orbit. The RRM contained a wide range of multi-use tools that were used to conduct a number of experiments involving the repair, retrofit, and augmentation of a hypothetical spacecraft in orbit. The RRM experiments confirmed that spacecraft that were not initially designed for refueling or in-orbit modification could be successful refueled with the type of tools that the RRM provided and the type of flexible robotic system available on the ISS through the DEXTRE.
The key to the RRM project was the use of the especially designed Canadarm 2 DEXTRE system that is capable of many complex and intricate operations that can be executed through ground commands. [NASA Robotic Refueling] (Fig. 2.4).
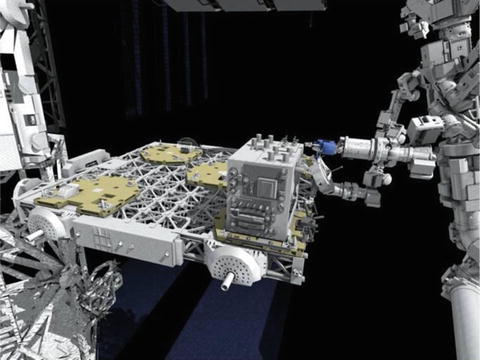
Fig. 2.4
The Dextre robotic device in tandem with the RRM was capable of a number of precision operations in space such as refueling, and orbital repairs and servicing (Graphics Courtesy of NASA)
RRM was initially deployed on the DEXTRE’s Enhanced Orbital Replacement Unit Temporary Platform (EOTP) and then after the Atlantis Shuttle departure, the RRM was installed at its permanent location on ExPRESS Logistics Carrier 4 (ELC-4). This location was key in that it allowed the RRM toolkit to be linked to ground command so that the DEXTRE system could carry out the complex RRM experiments.
Thus after the RRM module was installed on the ELC-4 platform, NASA mission controllers could operate the DEXTRE robot to retrieve RRM tools from this multi-tool module and conduct a range of servicing and refueling tasks. These experiments included manipulating, cutting and repositioning wiring and uncovering protective blankets. It also allowed the unscrewing of a variety of caps and access valves in order to transfer fluid and simulate refueling. At the end of this operation DEXTRE was able to put a new fuel cap on the fuel tank that had been opened. Specifically RRM tools were used to open up a fuel valve and transfer its stored liquid ethanol from one tank to another using a robotic fueling hose. [NASA Robotic Refueling]
These experiments were clearly primarily aimed at proving the viability of refueling and retrofitting satellites in orbit using remote mission controllers issuing commands from the ground. It should be noted, however, that very similar capabilities would be needed to capture a defunct spacecraft or upper stage launcher to install a system that would allow the active deorbit of selected orbit debris positioned in low earth orbit. The NASA RRM mission, since it was able to use the DEXTRE robotic system installed on the International Space Station, was able to be carried out at a much lower cost than the Orbital Express mission. It was able to carry out more detailed and intricate space repair operations than the earlier mission.
Phoenix Program by DARPA
The Phoenix Program by the U.S. Defense Advanced Research Projects Agency represents the continuing engineering and design programs of this agency in the area of in-orbit servicing and robotic construction in space. This is an extension of the earlier Orbital Express project in several ways. This program, rather than being in low earth orbit (a few hundred kilometers above the Earth’s surface) is designed to carry out servicing and even space construction and operations in the much more difficult and demanding regime of Geosynchronous Orbit (GEO). This orbit, in the equatorial plane, is almost a tenth of the way to the Moon at nearly 36,000 km away from the Earth’s surface. Robotic tele-commands from this great altitude are much more demanding.
This program is not only about servicing or capture of a satellite to attach a capability to move to a safe “parking orbit”, but also about a whole new architecture for satellite design, assembly, and extended capability in orbit. One of the design concepts is that of modular units that could be assembled to create larger and larger capabilities over time. Perhaps most controversially is the idea that large aperture antennas or even solar arrays on defunct satellites might be “harvested” from these space debris objects and redeployed on assembled “satlets” in order to renew their use as totally reconstituted satellite systems. This would take the concept of active debris removal to a whole new level of “collecting space junk and reassembling it” into new functional spacecraft rather than de-orbiting it (Fig. 2.5).
Fig. 2.5
DARPA architectural concept of aggregating Satlet modules (Graphics courtesy of DARPA)
This project, like the mythical phoenix, is designed to rise up anew from the dead and spring its wings anew, is not only extremely demanding in terms of its technological dimensions, but is also quite challenging in terms of new aspects of international space law. Does outer space salvaging translate as an exact parallel to the law of the sea? Do such concepts conjure up a vision that this would be a sort of space weapon that could act not only on a defunct space object, but also could represent a space operations vehicle that could disable the spacecraft of other nations? The Secure World Foundation has been asked by the US Government and by DARPA in particular to explore what are the legal and regulatory implications of satlets and harvesting of components such as antennas and solar arrays from defunct satellites.
Raven—The Autonomous Rendezvous Experiment
Raven is a follow on to the Robotics Refueling Mission, but in this case it is a part of the Department of Defense (DARPA) Space Test Program-Houston 5 (STP-H5) payload. It will emphasize the demonstration of a real-time relative navigation system for proximity navigation to be utilized in on-orbit servicing. The object is to allow future spacecraft to be able to autonomously mate with both prepared vehicles and those not designed for servicing. This is another joint program between NASA and the US Department of Defense. This experiment will fly on the International Space Station (ISS) and the launch date is planned for the first part of 2016.
For this experiment the DEXTRE robot will mount the so-called STP-H5 payload to an exterior platform (ELC-1) on the space station. Mission operators will subsequently use collected data related the instantaneous tracking of arriving and department spacecraft to the ISS. The goal is to improve Raven’s performance in preparation for space flight on an independent robotically-controlled autonomous spacecraft.
Using the International Space Station as a test bed, the SSCO team will examine how Raven’s sensors, avionics and algorithms work together as an integrated system. [Raven]
Privately Backed Orbital Remediation Programs and Initiatives
There are a number of private companies and institutions that are intent on seeking to address the space debris problem.